Graph class, to manipulate graphs in 2D. More...
#include <graph.hpp>
Public Member Functions | |
| Graph () | |
| Construct a new Graph object. | |
| Graph (Cloud cloud) | |
| Construct a new Graph object based on a cloud of points. | |
| Graph (std::vector< Point > points) | |
| Construct a new Graph object based on a list of points. | |
| Graph (std::vector< float > x, std::vector< float > y) | |
| Construct a new Graph object based on x and y coordinates. | |
| void | add_edge (std::vector< int > edge, float weight) |
| Add an edge to the graph. | |
| void | add_edge (std::vector< int > edge) |
| Add an edge to the graph with default weight. | |
| std::vector< int > | dijkstra (int source_point_index, int target_point_index) |
| Return the shortest route between two points using Dijkstra's algorithm. | |
| float | get_edge_length (int k) |
Get the length of edge k. | |
| std::vector< float > | get_edge_x_pairs () |
| Return x coordinates of the edges (as pairs). | |
| std::vector< float > | get_edge_y_pairs () |
| Return y coordinates of the edges (as pairs). | |
| std::vector< float > | get_lengths () |
| Get the length of all the edges. | |
| size_t | get_nedges () |
| Get the number of edges in the graph. | |
| Graph | minimum_spanning_tree_prim () |
| Generate a Minimum Spanning Tree (MST) of the graph using Prim's algorithm. | |
| void | print () |
| Print the graph data to the standard output. | |
| Graph | remove_orphan_points () |
| Remove orphan points from the graph. | |
| void | to_array (Array &array, glm::vec4 bbox, bool color_by_edge_weight=true) |
| Project the graph to an array and optionally color by edge weight. | |
| void | to_array_fractalize (Array &array, glm::vec4 bbox, int iterations, std::uint32_t seed, float sigma=0.3f, int orientation=0.f, float persistence=1.f) |
| Apply fractalization to graph edges and project to an array. | |
| Array | to_array_sdf (glm::ivec2 shape, glm::vec4 bbox, Array *p_noise_x=nullptr, Array *p_noise_y=nullptr, glm::vec4 bbox_array={0.f, 1.f, 0.f, 1.f}) |
| Generate an array filled with the Signed Distance Function (SDF) to the graph. | |
| void | to_csv (std::string fname_xy, std::string fname_adjacency) |
| Export graph data to CSV files. | |
| void | to_png (std::string fname, glm::ivec2 shape={512, 512}) |
| Export the graph as a PNG image file. | |
| void | update_adjacency_matrix () |
| Update the adjacency matrix of the graph. | |
| void | update_connectivity () |
| Update the point connectivity information. | |
 Public Member Functions inherited from hmap::Cloud Public Member Functions inherited from hmap::Cloud | |
| Cloud () | |
| Default constructor for the Cloud class. | |
| virtual | ~Cloud ()=default |
| Cloud (int npoints, std::uint32_t seed, glm::vec4 bbox={0.f, 1.f, 0.f, 1.f}) | |
| Constructs a new Cloud object with random positions and values. | |
| Cloud (const std::vector< Point > &points) | |
| Constructs a new Cloud object based on a list of existing points. | |
| Cloud (const std::vector< float > &x, const std::vector< float > &y, float default_value=0.f) | |
Constructs a new Cloud object from lists of x and y coordinates. | |
| Cloud (const std::vector< float > &x, const std::vector< float > &y, const std::vector< float > &v) | |
Constructs a new Cloud object from lists of x and y coordinates with assigned values. | |
| Cloud (const std::vector< glm::ivec2 > &indices, const glm::ivec2 &shape, const glm::vec4 &bbox={0.f, 1.f, 0.f, 1.f}) | |
| Construct a point cloud from grid indices mapped to a bounding box. | |
| Cloud (const std::vector< glm::vec3 > &xyv) | |
| Constructs a new Cloud object from lists of xyz data as glm::vec3. | |
| void | add_point (const Point &p) |
| Add a new point to the cloud. | |
| void | remove_point (int point_idx) |
| Remove a point from the cloud. | |
| glm::vec4 | get_bbox () const |
| Get the bounding box of the cloud. | |
| Point | get_center () const |
| Calculates the centroid of a set of points. | |
| std::vector< int > | get_convex_hull () const |
| Computes the indices of the points that form the convex hull of a set of points. | |
| std::vector< float > | get_values () const |
| Get the values assigned to the points in the cloud. | |
| float | get_values_max () const |
| Get the maximum value among the points in the cloud. | |
| float | get_values_min () const |
| Get the minimum value among the points in the cloud. | |
| std::vector< float > | get_x () const |
Get the x coordinates of the points in the cloud. | |
| std::vector< float > | get_xy () const |
Get the concatenated x and y coordinates of the points in the cloud. | |
| std::vector< float > | get_y () const |
Get the y coordinates of the points in the cloud. | |
| size_t | nearest_point (const glm::vec2 &xy) const |
| Find the index of the nearest point in the cloud. | |
| void | set_points (const std::vector< float > &x, const std::vector< float > &y) |
| Set points of the using x, y coordinates. | |
| void | set_values (const std::vector< float > &new_values) |
| Set new values for the cloud points. | |
| void | set_values (float new_value) |
| Set a single value for all cloud points. | |
| void | set_values_from_array (const Array &array, const glm::vec4 &bbox={0.f, 1.f, 0.f, 1.f}) |
| Set the values of the cloud points using values from an underlying array. | |
| void | set_values_from_border_distance (const glm::vec4 &bbox={0.f, 1.f, 0.f, 1.f}) |
| Sets point values based on their distance to the bounding box border. | |
| void | set_values_from_chull_distance () |
| Set the values of the cloud points based on the distance to the convex hull of the cloud. | |
| void | set_values_from_min_distance () |
| Sets point values based on the distance to their nearest neighbor. | |
| size_t | size () const |
| Get the number of points in the cloud. | |
| void | clear () |
| Clear all data from the cloud. | |
| void | print () |
| Print information about the cloud's points. | |
| void | randomize (std::uint32_t seed, glm::vec4 bbox={0.f, 1.f, 0.f, 1.f}) |
| Randomize the positions and values of the cloud points. | |
| void | remap_values (float vmin, float vmax) |
| Remap the values of the cloud points to a target range. | |
| void | shuffle (float dx, float dy, std::uint32_t seed, float dv=0.f) |
| Randomly perturbs the positions and values of all points in the cloud. | |
| void | snap_points_to_bounding_box (const glm::vec4 &bbox={0.f, 1.f, 0.f, 1.f}, float tolerance_ratio=1.f) |
| Snap points to the bounding box edges and corners. | |
| bool | from_csv (const std::string &fname) |
| Loads point data from a CSV file into the Cloud object. | |
| void | to_array (Array &array, glm::vec4 bbox={0.f, 1.f, 0.f, 1.f}) const |
| Project the cloud points onto an array. | |
| Array | to_array (glm::ivec2 shape, glm::vec4 bbox) const |
| See hmap::to_array. | |
| void | to_array_interp (Array &array, glm::vec4 bbox={0.f, 1.f, 0.f, 1.f}, InterpolationMethod2D interpolation_method=InterpolationMethod2D::ITP2D_DELAUNAY, Array *p_noise_x=nullptr, Array *p_noise_y=nullptr, glm::vec4 bbox_array={0.f, 1.f, 0.f, 1.f}) const |
| Interpolate the values of an array using the cloud points. | |
| void | to_csv (const std::string &fname) const |
| Export the cloud data to a CSV file. | |
| Graph | to_graph_delaunay () |
| Convert the cloud to a graph using Delaunay triangulation. | |
| void | to_png (const std::string &fname, int cmap, glm::vec4 bbox={0.f, 1.f, 0.f, 1.f}, int depth=CV_8U, glm::ivec2 shape={512, 512}) |
| Saves the current data as a PNG image file. | |
| std::vector< glm::vec3 > | to_vec3 () const |
| Convert path points to a vector of 3D positions. | |
Public Attributes | |
| std::vector< std::vector< int > > | edges = {} |
| Edges of the graph. | |
| std::vector< float > | weights = {} |
| Edge weights. | |
| std::vector< std::vector< int > > | connectivity = {} |
| Store point connectivity. | |
| std::map< std::pair< int, int >, float > | adjacency_matrix |
| Adjacency matrix. | |
| Public Attributes inherited from hmap::Cloud | |
| std::vector< Point > | points = {} |
| Points of the cloud. | |
Detailed Description
Graph class, to manipulate graphs in 2D.
This class represents a 2D graph, allowing the creation, manipulation, and analysis of graphs derived from point clouds. It supports operations such as graph construction, traversal, and various geometric analyses. This class inherits from the Cloud class, leveraging the functionalities of point clouds while adding graph-specific methods.
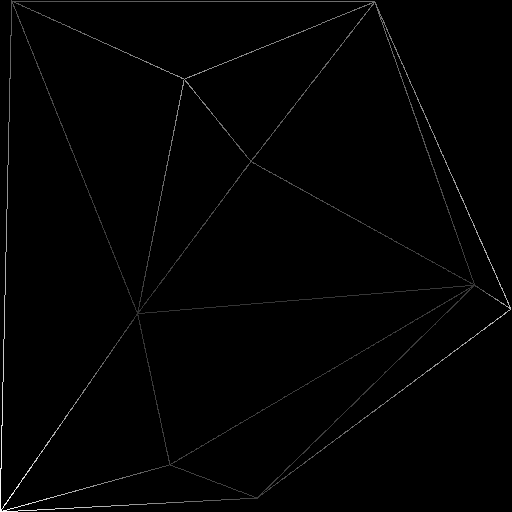
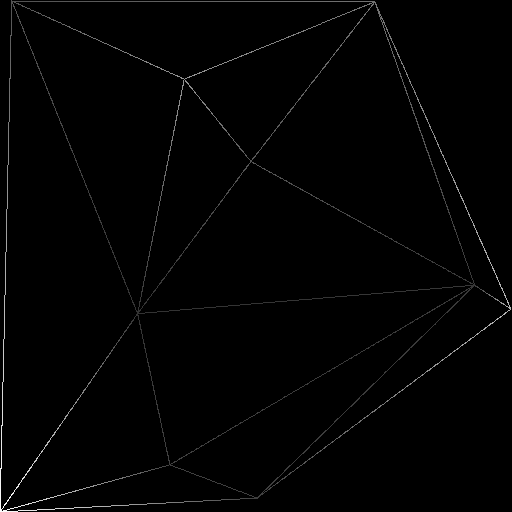
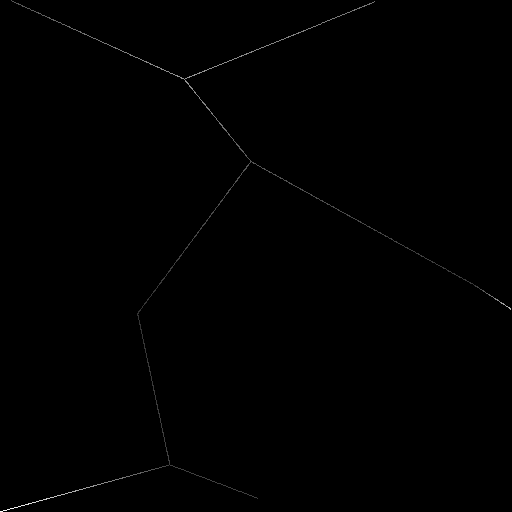
Example
Result
Constructor & Destructor Documentation
◆ Graph() [1/4]
|
inline |
◆ Graph() [2/4]
|
inline |
Construct a new Graph object based on a cloud of points.
This constructor initializes a Graph object using a Cloud object. The Cloud object provides the points which will be used to construct the graph. This constructor is useful when you have a Cloud object and want to create a Graph representation from it.
- Parameters
-
cloud The cloud of points used to initialize the graph.
◆ Graph() [3/4]
|
inline |
Construct a new Graph object based on a list of points.
This constructor initializes a Graph object using a vector of Point objects. The Point objects are used to populate the vertices of the graph. This constructor is useful when you have a list of Point objects and want to create a Graph representation from them.
- Parameters
-
points The list of points used to initialize the graph.
◆ Graph() [4/4]
|
inline |
Construct a new Graph object based on x and y coordinates.
This constructor initializes a Graph object using separate vectors for x and y coordinates. The points are created from these coordinates and used to populate the vertices of the graph. This constructor is useful when you have x and y coordinates and want to create a Graph representation from them.
- Parameters
-
x Vector of x coordinates for the points. y Vector of y coordinates for the points.
Member Function Documentation
◆ add_edge() [1/2]
| void hmap::Graph::add_edge | ( | std::vector< int > | edge, |
| float | weight | ||
| ) |
Add an edge to the graph.
This method adds a new edge to the graph. The edge is specified by a vector of two indices representing the points connected by the edge. The weight of the edge can be provided explicitly; if not provided, the Euclidean distance between the connected points is used as the default weight.
- Parameters
-
edge A vector of two integers representing the indices of the points connected by the edge. weight The weight of the edge. If not provided, the default weight is calculated as the Euclidean distance between the points.
◆ add_edge() [2/2]
| void hmap::Graph::add_edge | ( | std::vector< int > | edge | ) |
Add an edge to the graph with default weight.
This method adds a new edge to the graph. The edge is specified by a vector of two indices representing the points connected by the edge. The weight of the edge is calculated as the Euclidean distance between the connected points.
- Parameters
-
edge A vector of two integers representing the indices of the points connected by the edge.
◆ dijkstra()
| std::vector< int > hmap::Graph::dijkstra | ( | int | source_point_index, |
| int | target_point_index | ||
| ) |
Return the shortest route between two points using Dijkstra's algorithm.
This method computes the shortest path from a specified source point to a target point in the graph using Dijkstra's algorithm. It returns a vector of point indices representing the route from the source to the target point.
- Parameters
-
source_point_index The index of the starting point in the graph. target_point_index The index of the ending point in the graph.
- Returns
- std::vector<int> A vector of point indices representing the shortest path from the source to the target.
Example
◆ get_edge_length()
| float hmap::Graph::get_edge_length | ( | int | k | ) |
Get the length of edge k.
This method calculates the Euclidean length of a specific edge in the graph. The edge is identified by the index k, and its length is determined by the distance between the two vertices connected by the edge.
- Parameters
-
k Index of the edge for which the length is to be computed.
- Returns
- float The Euclidean length of the edge.
◆ get_edge_x_pairs()
| std::vector< float > hmap::Graph::get_edge_x_pairs | ( | ) |
Return x coordinates of the edges (as pairs).
This method returns the x coordinates of the endpoints of each edge in the graph. The coordinates are returned as a vector of floats, where each pair of floats represents the x coordinates of an edge's endpoints.
- Returns
- std::vector<float> The x coordinates of the edges.
◆ get_edge_y_pairs()
| std::vector< float > hmap::Graph::get_edge_y_pairs | ( | ) |
Return y coordinates of the edges (as pairs).
This method returns the y coordinates of the endpoints of each edge in the graph. The coordinates are returned as a vector of floats, where each pair of floats represents the y coordinates of an edge's endpoints.
- Returns
- std::vector<float> The y coordinates of the edges.
◆ get_lengths()
| std::vector< float > hmap::Graph::get_lengths | ( | ) |
Get the length of all the edges.
This method returns the lengths of all the edges in the graph. The lengths are computed using the Euclidean distance formula, and the result is returned as a vector of floats.
- Returns
- std::vector<float> The lengths of all the edges in the graph.
◆ get_nedges()
| size_t hmap::Graph::get_nedges | ( | ) |
Get the number of edges in the graph.
This method returns the total number of edges present in the graph. The edges are stored in a vector, and this method returns the size of that vector, which represents the number of edges.
- Returns
- size_t The number of edges in the graph.
◆ minimum_spanning_tree_prim()
| Graph hmap::Graph::minimum_spanning_tree_prim | ( | ) |
Generate a Minimum Spanning Tree (MST) of the graph using Prim's algorithm.
This method creates a Minimum Spanning Tree from the graph using Prim's algorithm. It returns a new Graph object that represents the MST, which connects all the points in the graph with the minimum total edge weight.
- Returns
- Graph The Minimum Spanning Tree (MST) of the original graph.
Example
Result**
◆ print()
| void hmap::Graph::print | ( | ) |
Print the graph data to the standard output.
This method prints the current state of the graph, including point coordinates, edges, and edge weights.
◆ remove_orphan_points()
| Graph hmap::Graph::remove_orphan_points | ( | ) |
◆ to_array()
| void hmap::Graph::to_array | ( | Array & | array, |
| glm::vec4 | bbox, | ||
| bool | color_by_edge_weight = true |
||
| ) |
Project the graph to an array and optionally color by edge weight.
This method projects the graph onto a 2D array. The array's elements are filled based on the graph's structure, and optionally, the color can represent edge weights. This allows visual representation of the graph in array form.
- Parameters
-
array The input array to project the graph onto. bbox The bounding box for the array. color_by_edge_weight If true, colors the array based on edge weights; otherwise, colors by node values.
◆ to_array_fractalize()
| void hmap::Graph::to_array_fractalize | ( | Array & | array, |
| glm::vec4 | bbox, | ||
| int | iterations, | ||
| std::uint32_t | seed, | ||
| float | sigma = 0.3f, |
||
| int | orientation = 0.f, |
||
| float | persistence = 1.f |
||
| ) |
Apply fractalization to graph edges and project to an array.
This method applies a fractalization process to the graph edges, creating a more complex structure, and then projects the result onto an array. The fractalization includes multiple iterations and random Gaussian displacement to generate a fractal effect. The parameters control the number of iterations, randomness, and how the graph path is altered.
- Parameters
-
array The input array to project the fractalized graph onto. bbox The bounding box for the array. iterations Number of fractalization iterations to perform. seed Random seed number for stochastic processes. sigma Half-width of the Gaussian displacement normalized by the distance between points. orientation Displacement orientation: 0 for random inward/outward, 1 to inflate, -1 to deflate. persistence Noise persistence factor with respect to iteration number.
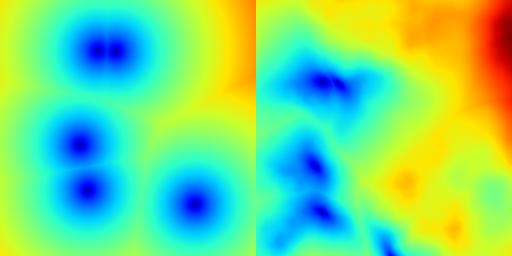
◆ to_array_sdf()
| Array hmap::Graph::to_array_sdf | ( | glm::ivec2 | shape, |
| glm::vec4 | bbox, | ||
| Array * | p_noise_x = nullptr, |
||
| Array * | p_noise_y = nullptr, |
||
| glm::vec4 | bbox_array = {0.f, 1.f, 0.f, 1.f} |
||
| ) |
Generate an array filled with the Signed Distance Function (SDF) to the graph.
This method computes the signed distance function for the graph, which measures the distance of each point in the array to the nearest edge of the graph. The result is projected onto an output array. The optional noise arrays can be used for domain warping.
- Parameters
-
shape The shape of the output array. bbox The bounding box defining the area over which the SDF is computed. p_noise_x Reference to the input noise array for domain warping in the x-direction (optional). p_noise_y Reference to the input noise array for domain warping in the y-direction (optional). bbox_array The bounding box of the destination array.
- Returns
- Array The resulting array with the signed distance function values.
Example
Result**
◆ to_csv()
| void hmap::Graph::to_csv | ( | std::string | fname_xy, |
| std::string | fname_adjacency | ||
| ) |
Export graph data to CSV files.
This method exports the graph data to two separate CSV files: one for node coordinates and one for the adjacency matrix. The node coordinates file contains the (x, y) coordinates of the graph's nodes, and the adjacency matrix file contains the graph's connectivity information.
- Parameters
-
fname_xy Filename for the CSV file containing node (x, y)coordinates.fname_adjacency Filename for the CSV file containing the adjacency matrix.
◆ to_png()
| void hmap::Graph::to_png | ( | std::string | fname, |
| glm::ivec2 | shape = {512, 512} |
||
| ) |
Export the graph as a PNG image file.
This method exports a visual representation of the graph as a PNG image file. The resolution of the image can be specified using the shape parameter.
- Parameters
-
fname The file name for the PNG image. shape The resolution of the image in pixels (width, height).
◆ update_adjacency_matrix()
| void hmap::Graph::update_adjacency_matrix | ( | ) |
Update the adjacency matrix of the graph.
This method updates the adjacency matrix based on the current graph edges and weights. The adjacency matrix represents the connectivity between nodes in the graph.
◆ update_connectivity()
| void hmap::Graph::update_connectivity | ( | ) |
Update the point connectivity information.
This method updates the point connectivity data, which describes the relationships between nodes in the graph based on the current edges.
Member Data Documentation
◆ edges
| std::vector<std::vector<int> > hmap::Graph::edges = {} |
Edges of the graph.
This member variable stores the edges of the graph. Each edge is represented as a pair of indices referring to the vertices in the graph. The edges are stored as a vector of vectors, where each inner vector contains the indices of vertices connected by that edge.
◆ weights
| std::vector<float> hmap::Graph::weights = {} |
Edge weights.
This member variable stores the weights associated with the edges of the graph. Each weight corresponds to an edge and is stored in a vector. The weights are used to represent the cost or distance associated with traveling along an edge in the graph.
◆ connectivity
| std::vector<std::vector<int> > hmap::Graph::connectivity = {} |
Store point connectivity.
This member variable stores the connectivity information of the points in the graph. It is represented as a vector of vectors, where each inner vector contains the indices of neighboring vertices connected to the corresponding point.
◆ adjacency_matrix
| std::map<std::pair<int, int>, float> hmap::Graph::adjacency_matrix |
Adjacency matrix.
This member variable represents the adjacency matrix of the graph. It is a map where each key is a pair of vertex indices and the value is the weight of the edge connecting those vertices. The adjacency matrix provides a way to quickly access the weight of an edge between any two vertices.
The documentation for this class was generated from the following files: